Throttle & brake fusion
Using the drvopts parameter, you can change the behavior of the throttle and brake signals.
This page presumes you have already set up the throttle and brake signals. ie. you have already set the ASC and CSC blocks for the throttle and brake signals.
| Dec value | Bit position | Description |
|---|---|---|
| 4 | 2 | Combine add throttle and brake signal |
| 8 | 3 | Disable reversing from the throttle and brake fusion |
| - | - | Other values description is elsewhere |
drvopts is bitwise parameter, each bit has some function. In this documentation is described only the 2th and 3th bit.
Default function
With default settings (Both bits are zero), the throttle signal is sent to the driver, without being modified by the brake signal. If the brake signal is non zero, the driver will brake the motor (without being modified by throttle).
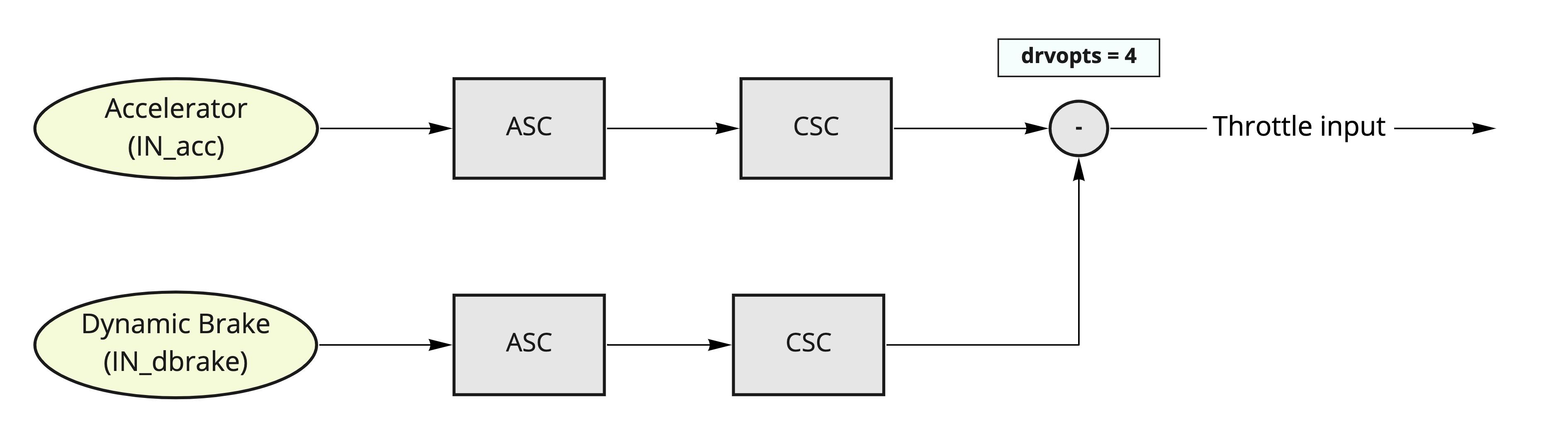
Reversing from dynamic brake
The signal from the dynamic brake (after CSC) is subtracted from the throttle signal (after CSC). Both positive and negative signal continues via the same path (as a general throttle signal), but the negative value of the acceleration signal causes the opposite direction of the motor to spin (allowing reverse).
This function can be helpful if there is a need for an instant transition to the reverse direction. ie. one peddle for forward, the other for reverse (like in a forklift truck. If you press both pedals, the subtraction is zero and the motor stops.
This function is activated if paramter
drvoptsis set to 4
Throttle & brake fusion
The signal path is the same as in the previous mode (the dynamic brake is subtracted from the throttle). The difference is that if the signal is negative, it is used as a braking signal and the motor starts to brake (braking force is defined by the value of the signal). This is acting similar as a clutch with the fact that the motor is braking if the resultant signal is below zero.
This function is activated if paramter
drvoptsis set to 12 (4+8)
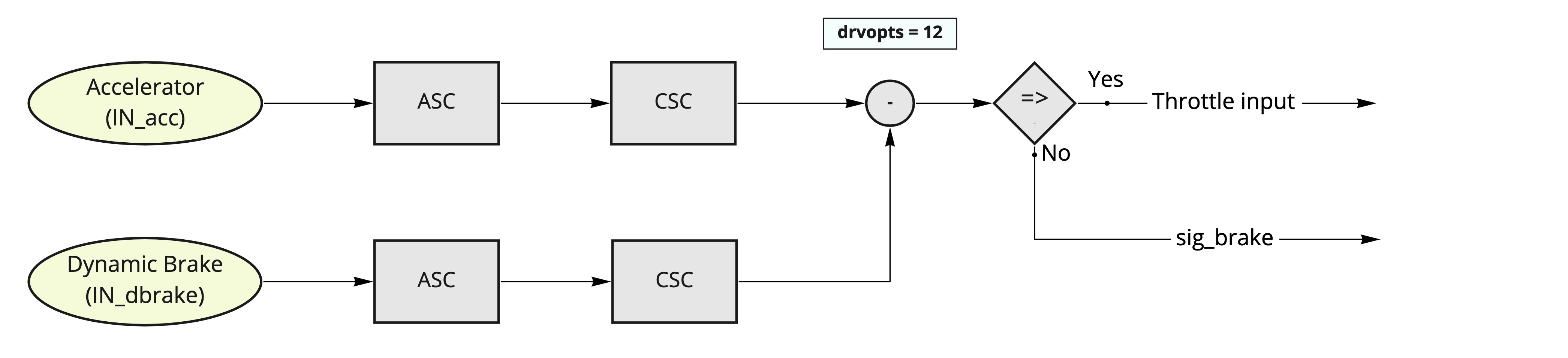
Difference from the clutch input is, that here the signals are added not multiplied.
- With a clutch if you press full clutch, the motor is not spinning (freewheel): and does matter if you are at full throttle or not.
- With throttle and brake fusion, if you press full brake, the motor is braking with full force.
Reversing from throttle
There is also a possibility to reverse using the throttle. Part of the throttle range is used for forward and the other part for reverse. This is useful for vehicles with a single pedal for forward and reverse.
To activate this function, you need to set the center parameter in the throttle ASC. Positive value from the ASC is used for forward, negative for reverse. The center parameter is used to define the zero point of the throttle signal. Using the ldz parameter in the CSC you can set the deadzone around zero point.
This function will not work together with:
- Throttle & brake fusion
- Reversing from dynamic brake
- Combined brake (comlvl)